
Clasament



Conţinut popular
Se afişează conţinutul cel mai apreciat din 14.06.2026 în toate secţiunile
-
Nu avea coroziune placa, decât foarte putina in zona polilor bateriilor.Vizual nu are nimic defect, am curățat o cu spray de contacte și uscată apoi.Cred că la verificarea componentelor sunt depășit, traseele nu au vreo urma de coroziune, așa merge de când am luat o, posibil sa mai meargă mult și bine, mulțumesc pentru interesul acordat și sfatul de a scoate bateria interna.1 point
-
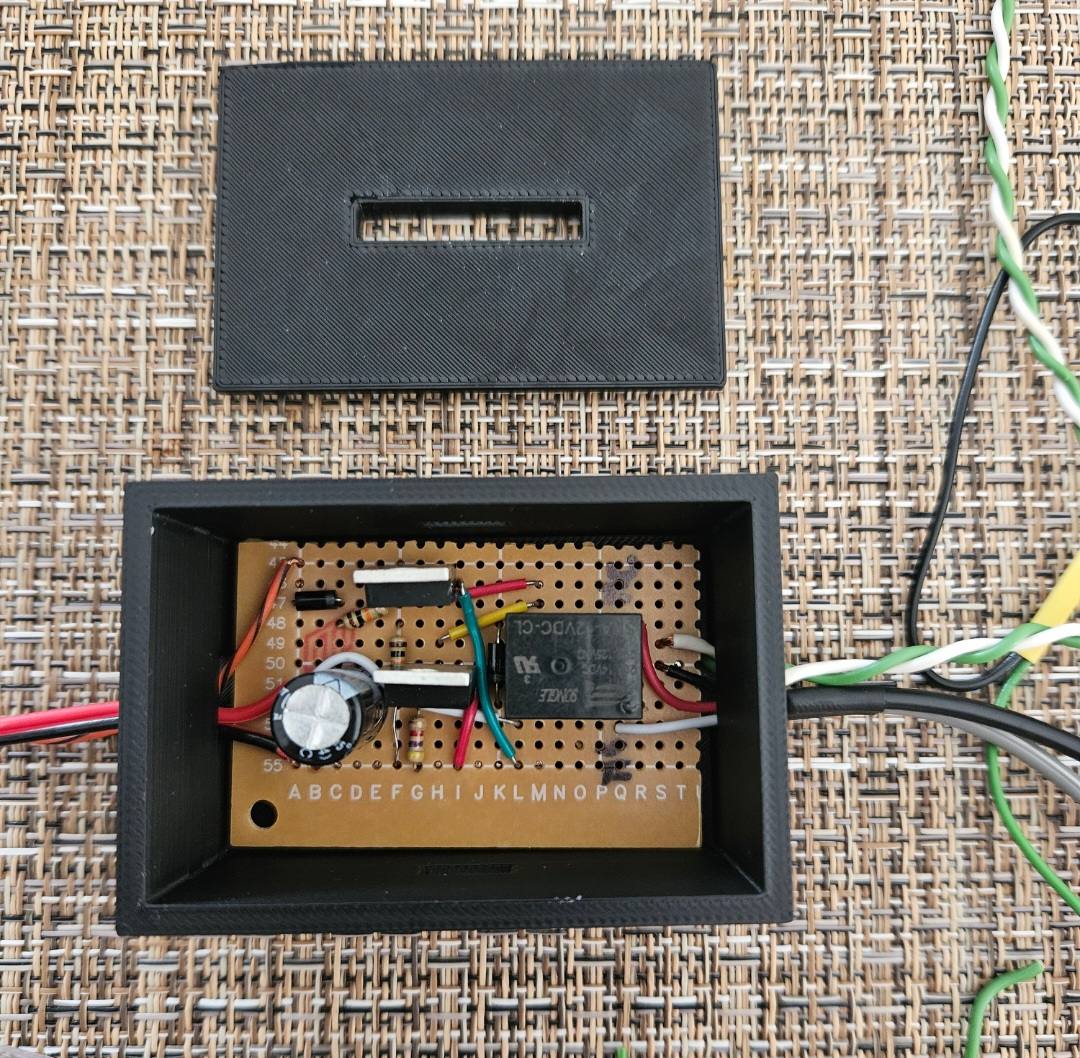
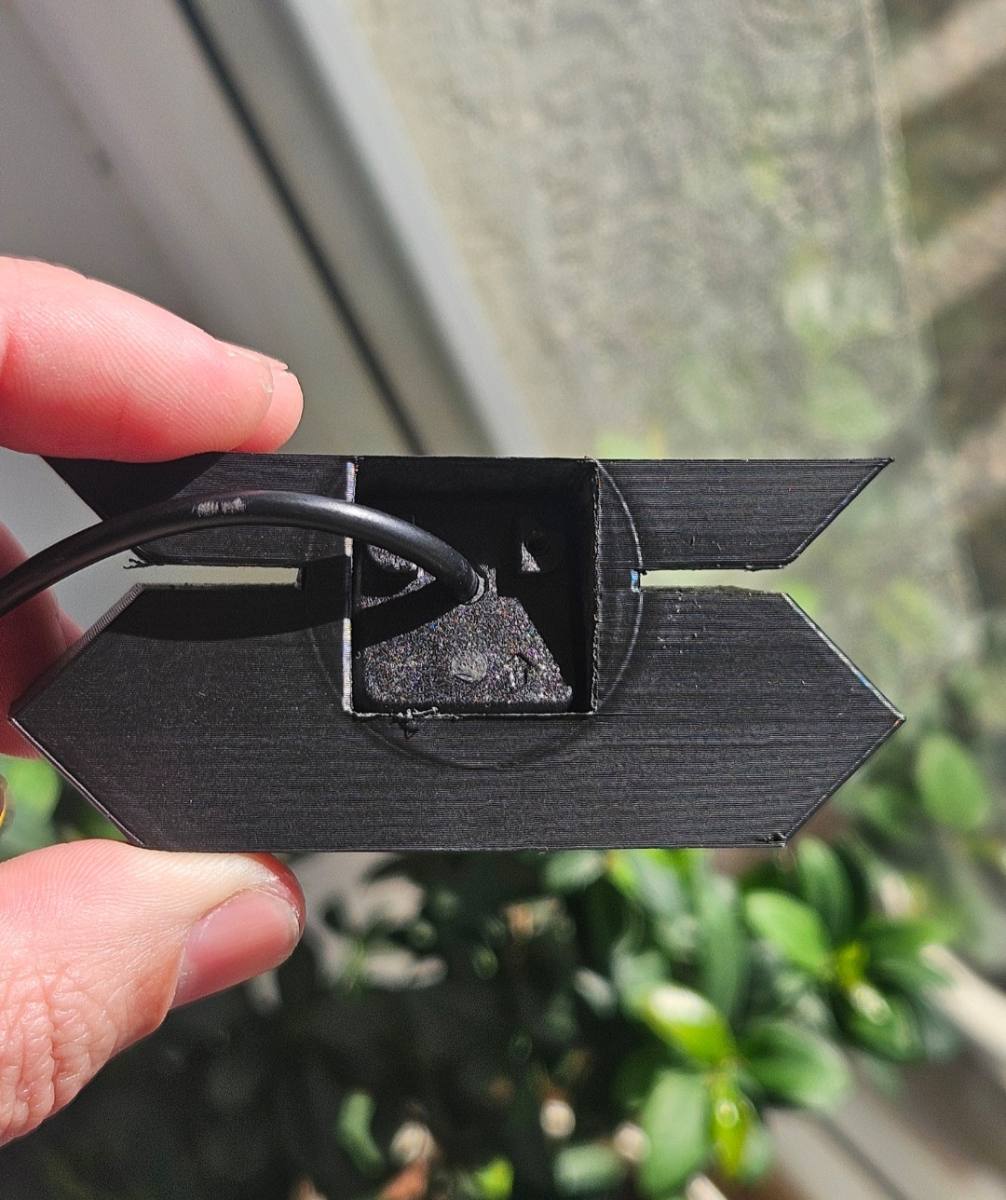
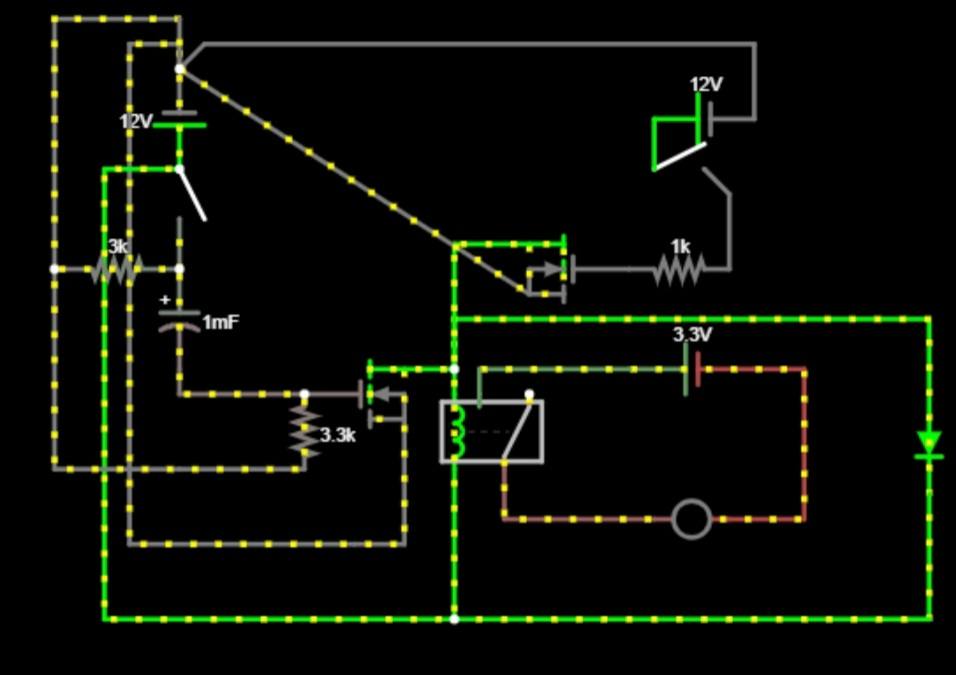
Salutare tuturor, De ceva vreme aveam în cap un proiect: montarea unei camere frontale de parcare pentru a avea o vizibilitate mult mai bună la ieșirea din curte, dintre blocuri sau din spațiile strâmte unde bordurile sunt o problemă. Pasul 1: Upgrade-ul la Cameră Spate Highline Paradoxal, primul pas necesar pentru a monta o cameră frontală a fost înlocuirea camerei de marșarier existente. Aveam deja o cameră Lowline, însă imaginea video de la aceasta dispare instantaneu în secunda în care scoți mașina din marșarier. Pentru proiectul meu, aveam nevoie de o cameră Highline, deoarece aceasta menține semnalul video activ o perioadă după ce ai scos din marșarier sau când apeși butonul de Park Pilot. Nu voi intra în detalii despre cum se face retrofitul de cameră Highline (a fost descris deja de un coleg într-un topic mai vechi), însă în linii mari: am păstrat cablul video existent, am înlocuit camera de pe haion cu una nouă Highline (găsită pe China, gata codată și parametrizată pentru Skoda Karoq) și am tras suplimentar 2 fire pentru CAN H/L și un cablu de alimentare. Aceasta poate fi activată acum atât la introducerea în marșarier, cât și manual din butonul de senzori de parcare. Pasul 2: Alegerea și montarea camerei frontale Piața este plină de camere de slabă calitate. Condiția obligatorie a fost ca noua cameră să fie CVBS (analogic standard), deoarece tehnologia AHD nu este suportată de unitatea multimedia originală a mașinii. Am ales un model cu un unghi de vizualizare de aprox. 170 de grade. După ce am făcut măsurătorile pe mașină, am proiectat în Tinkercad un suport dedicat pe care l-am printat ulterior 3D. Inițial, voiam să montez camera exact sub radarul Front Assist, așa cum vine la sistemele originale 360 (Area View). Totuși, la prima generație de Karoq, acel capac de plastic se dă jos cu tot cu grila inferioară și nu am vrut să risc o mișcare greșită care să recalibreze radarul (erorile ACC sunt scumpe). După câteva teste cu înclinații de 10 și 15 grade ale suportului, am rămas la o înclinație finală de 20 de grade – unghiul perfect pentru a vedea atât obstacolele de jos, cât și marginea bării din față. Am montat-o în grilă (decupând foarte puțin din fagurele de plastic), iar cablul l-am tras în habitaclu prin peretele de foc, pe sub suportul de baterie. Pasul 3: Problema de handshake (Diagnoza MQB) și Soluția M-am inspirat dintr-un proiect văzut la un tip cu un Golf 7: o schemă simplă cu un releu care comută semnalul video central între cele două camere. Am făcut circuitul, l-am probat pe mașină cu motorul oprit și totul părea perfect. Problema a apărut la pornirea motorului: Pe platforma MQB, la inițializare, sistemul Park Pilot verifică activ prezența și semnalul video de la camera de marșarier (un fel de handshake digital). Dacă în acele prime secunde releul nu trimite semnalul de la camera spate, modulul 6C/5F aruncă o eroare de Video Signal Open Circuit și blochează complet sistemul video până la următorul ciclu de contact. Teoretic, trebuia să pornesc mereu mașina direct în marșarier ca să meargă, ceea ce era absurd. Circuitul Analogic de Temporizare Pentru a rezolva problema fără microcontrolere (Arduino), am construit un circuit simplu de temporizare bazat pe un grup RC (Rezistor-Condensator) și un tranzistor MOSFET: La pornire (ACC): Modulul ține releul cuplat forțat pe Camera Spate timp de aproximativ 5-10 secunde (în funcție de valorile condensatorului și ale rezistenței, acest timp poate fi mărit sau micșorat). Mașina își face inițializarea cu camera Highline în liniște, fără nicio eroare în modulele 5F și 6C. În mers: După ce trec cele 10 secunde, releul revine în starea de repaus pe Camera Față. Când am nevoie de camera spate, semnalul de marșarier activează din nou releul. Conexiunile electrice și finale Semnalul de marșarier de +12V l-am interceptat în partea pasagerului, din mănunchiul de fire care pleacă spre portbagaj (conform diagramelor electrice, este firul Albastru/Negru). Deoarece releul este comandat prin poarta unui tranzistor MOSFET, consumul de curent din firul mașinii este infim (ordinul miliamperilor), deci nu există niciun risc de eroare de bec ars sau suprasarcină pe BCM. Am adăugat și o diodă pe acest fir, ca protecție completă împotriva curentului invers. Întreg montajul a fost alimentat dintr-o siguranță dedicată de 5A din panou. Toate conexiunile video (Camera Față + Camera Spate) intră în modulul meu, iar ieșirea video centrală (cu semnalul comutat) merge direct în mufa albastră a unității MIB din torpedo. Am ascuns circuitul într-o carcasă mică de plastic (căreia i-am lăsat fante pentru aerisire) și am fixat-o discret pe unitatea MIB. Sistemul funcționează acum impecabil și total automat, exact ca o opțiune de fabrică! Vă las mai jos pozele din timpul proiectului (în poza cu circuitul pe masă era o variantă de test, îi lipsește dioda de protecție de pe marșarier). Aici un scurt video:
 1 point
1 point -
Depinde ce intelegi prin ,,afara". Nu te sfatuiesc sa alimentezi in Bulgaria. Am facut greseala sa pun Diesel vmax de la o statie Shell din Bulgaria, aflata pe drumul catre Varna. Imediat ce am iesit cu masina din benzinarie, a inceput sa huruie motorul, iar pierderea de putere a fost evidenta. Pana si sotia a observat acest lucru, m-a pus sa trag pe dreapta sa ne uitam pe bon ca nu cumva sa fi alimentat cu benzina. Nu era benzina, era motorina de cea ,,mai buna calitate". Ciudat este ca, cu 3 ani inainte, alimentasem la aceiasi statie si era OK. Deci sub nicio forma nu poti pune o statie Shell din Bulgaria cu una din Austria, spre exemplu.1 point
-
Cea mai buna motorina ptr motorul meu este cea OMV maxx motion diesel: motor clar mai silentios si care trage putin mai bine. Cea de la Rompetrol, chiar daca trage bine pe autostrada, mi se pare ca imi mareste putin turbolag-ul iar motorul e mai zgomotos (se aude tacanitul de diesel). Mol premium imi face motorul zgomotos, iar de la Petrom nu mai alimentez ptr ca motorul trage cel mai prost cu ea. Deci, de departe de OMV sunt cel mai multumit la motorina.1 point






Acest clasament este setat la Bucharest/GMT+03:00